Navigating CORD
Assembled from Components
A given instance of CORD is assembled from a set of disaggregated components. This assembly is done according to the general pattern shown in the following diagram.
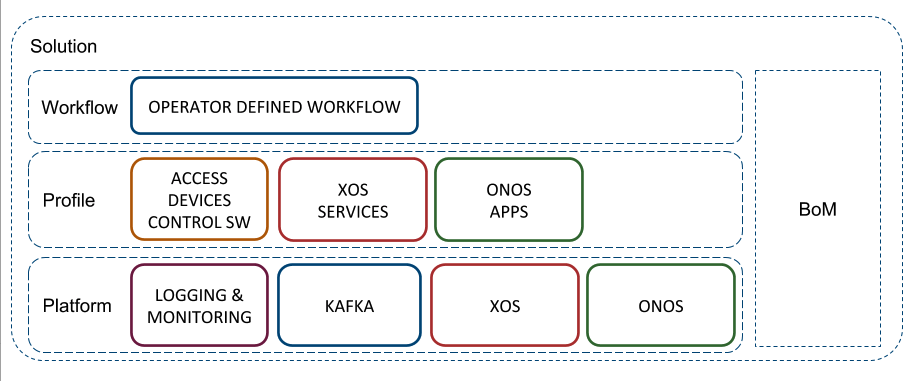
There are four major elements:
Kubernetes: All elements of the CORD control plane run in Kubernetes containers. CORD assumes a Kubernetes foundation (not shown above), but does not prescribe how Kubernetes or the underlying hardware are installed.
Platform: The Platform layer consists of ONOS, XOS, Kafka, and collection of Logging and Monitoring micro-services, all running on a Kubernetes foundation. The platform is common to all Profiles.
Profile: Each unique CORD configuration is defined by a Profile. It consists of a set of services (e.g., access services, VNFs, other cloud services), including both abstract services on-boarded into XOS and SDN control apps running on ONOS. Examples of profiles are SEBA and COMAC.
Workflow: A Profile typically includes a workflow, which defines the business logic and state machine for one of the access technologies contained in the Profile. A workflow customizes a Profile for an operator's target deployment environment; it is not a software layer, per se. SEBA's AT&T Workflow is an example.
The diagram also shows a hardware bill-of-materials, which must be defined for a given POD.
Operationalized in Stages
Understanding the relationship between installing, operating, and developing CORD—and the corresponding toolsets and specification files used by each stage—is helpful in navigating CORD.
Installation (Helm): Installing CORD means installing a collection of Docker containers in a Kubernetes cluster. We use Helm to carry out the installation, with the valid configurations defined by a set of
helm-charts. These charts specify the version of each container to be deployed, and so they also play a role in upgrading a running system. More information abouthelm-chartscan be found here.Operations (TOSCA): A running CORD POD supports multiple Northbound Interfaces (e.g., a GUI and REST API). We typically use
TOSCAto specify a recipe for configuring and provisioning a running system. A freshly installed CORD POD has a set of control plane and platform level containers running (e.g., XOS, ONOS, OpenStack), but until provisioned usingTOSCA, there are no services and no service graph. More information aboutTOSCAcan be found here.Development (XOS): The services running in an operational system are typically deployed as Docker containers, paired with a model that specifies how the service is to be on-boarded into CORD. This model is writen in the
xprotomodeling language, and processed by the XOS tool-chain. Among other things, this tool-chain generates the TOSCA-engine that is used to process the configuration and provisioning recipes used to operate CORD. More information aboutxproto(and other details about on-boarding a service) can be found in a companion XOS Guide.
These tools and containers are inter-related as follows:
Installing the platform brings up a set of XOS-related containers (e.g.,
xos-core,xos-gui,xos-tosca) that have been configured with a base set of models. Of these, thexos-toscacontainer implements the TOSCA engine, which takes TOSCA workflows as input and configures/provisions CORD accordingly.While the install and operate stages are distinct, for convenience, some helm-charts elect to launch a
tosca-loadercontainer (in Kubernetes parlance, it's a job and not a service) to load an initial TOSCA recipe into a newly deployed set of services. This is how a service graph is typically instantiated.While the CORD control plane is deployed as a set of Docker containers, not all of the services themselves run in containers. Some services are implemented as ONOS applications that have been packaged using Maven. In such cases, the Maven package are still specified in TOSCA.
Every service (whether implemented in Docker, or ONOS) has a counter-part synchronizer container running as part of the CORD control plane (e.g.,
volt-synchronizerfor the vOLT service). Typically, the helm-chart for a service launches this synchronizer container, whereas the TOSCA recipe creates, provisions, and initializes the backend container, VM, or ONOS app.Bringing up additional services in a running POD involves executing helm-charts to install the new service's synchronizer container, which in turn loads the corresponding new models into XOS. This load then triggers and upgrade and restart of the TOSCA engine (and other NBIs), which is a pre-requisite for configuring and provisioning that new service.
Upgrading an existing service is similar to bringing up a new service, where we depend on Kubernetes to incrementally roll out the containers that implement the service (and rollback if necessarily), and we depend on XOS to migrate from the old model to the new model (and support both old and new APIs during the transition period). Upgrading existing services has not been thoroughly tested.